夹具设计方案丨CRG为你打造定制化工装夹具,解决码垛难题!
发布时间:2023-06-16 16:12
发布人: admin
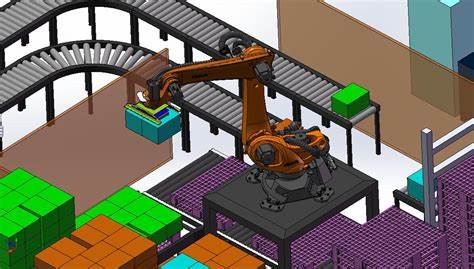
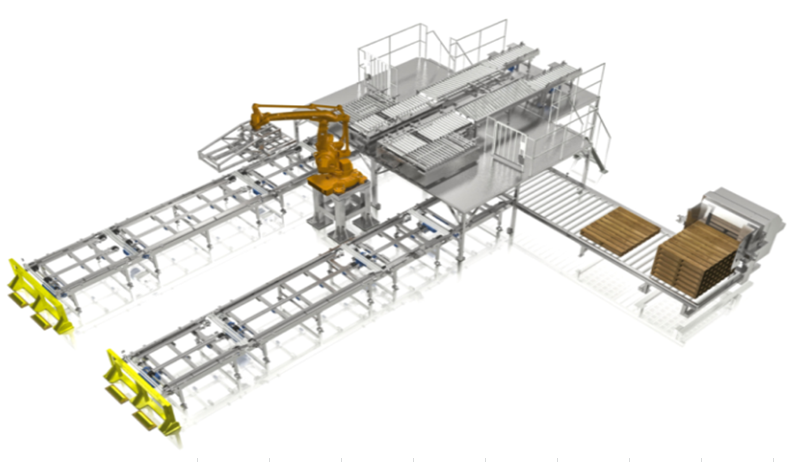
随着生产步伐加快和产品规模的不断扩大,在保证生产效率的同时尽可能地减少产品的开发周期俨然成为了各行各业共同追求的目标。机器搬运和码垛已经广泛地运用在在众多工业生产领域,能大幅提高工业生产效率,缩减财务开支,人力资源,可降低工作人员在作业期间遭遇事故的风险。
近年来,码垛机器人的本体和控制系统已日渐完善,而对于其末端执行机构,由于码垛对象或生产线的不同,码垛抓手呈现出机构类型多样化的特点,因此对抓手机构进行优化改进,提高其码垛精确性和效率显得尤为重要。
码垛末端抓手分类
真空吸附式抓手
此类抓手工作时被抓取物紧紧地附着于抓手之上,当要增加抓取物品的数目时,合理地增加真空吸附器装置即可,使用较为灵活。
夹板式抓手
这类抓手主要用于规则的盒或箱类货物的码放。
抓取式抓手
这类抓手主要用来码放袋装物品,例如色母粒颜料,化肥,水泥,饲料等,用途较为广泛。
托板式抓手
这类抓手的主体是由带托包板的夹包机构组成,主要用做高位码放作业。
组合抓取式抓手
由上述抓取方式协同抓取,例如夹板式和真空吸取式协同抓取。
CRG 是一家致力于机器人、机械手末端夹具(EOAT)设计、研发、生产、销售于一体的自动化公司,公司专注于机器人末端夹具应用二十多年,拥有上百项专利,工装夹具可以应用在码垛、搬运、注塑脱模取出等多个方面,可以根据客户的需求量身定制配套的夹具(EOAT)解决方案。