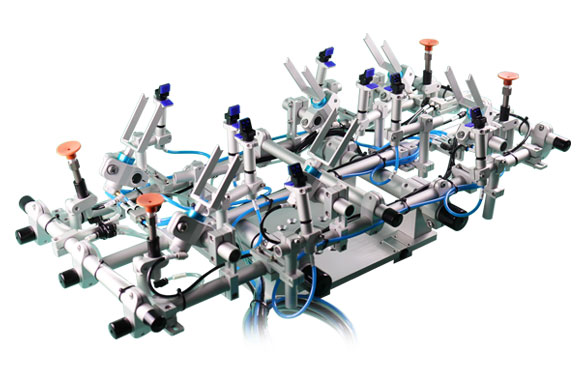
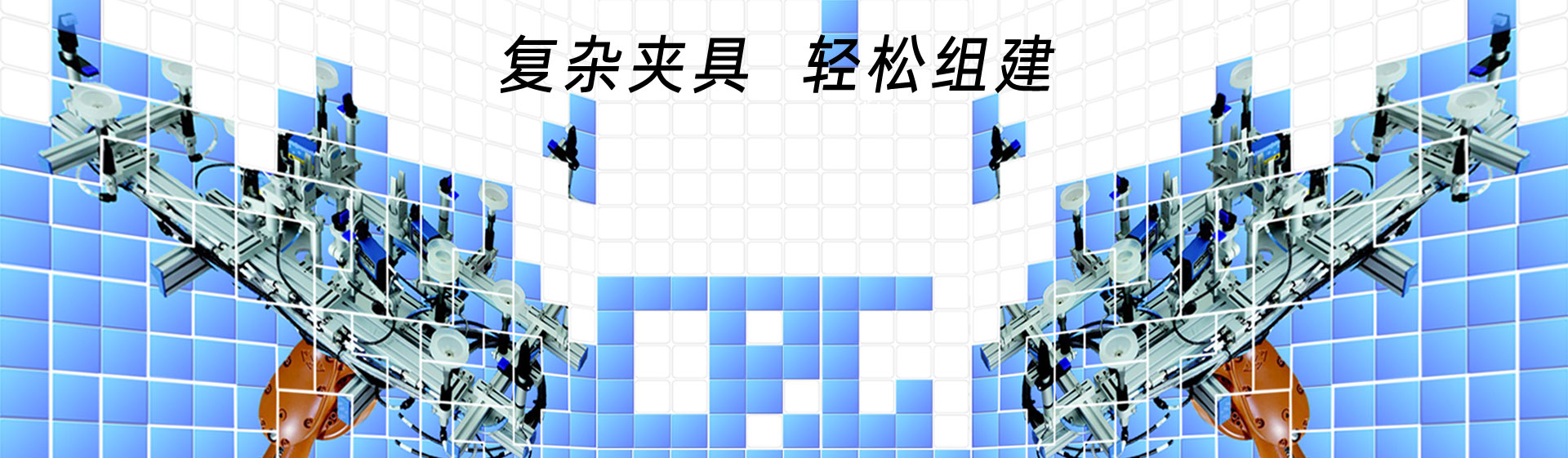
复杂夹具 轻松组建
专注于机器人末端工装夹具应用25年
语言: 中文简体丨English | 日本語
服务热线:18994415660/18900692126 |邮件:crg@crg-eoat.com |