据希瑞格的了解,一般机器人夹具主要有以下几种类型:
一、二指夹具
二指的机器人夹具一共有两个型号,分别是85mm和140mm,区别在于张开距离和负载大小不同。
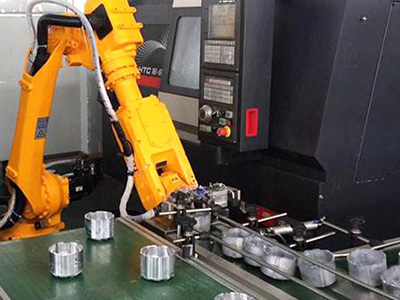
它是专为实体制造业设计,适应复杂的工业环境,可以像人类一样和机器手臂协调完成各种不同的工作,大大提升机器人的通用性,智能性和处理复杂任务的能力。它主要应用于机械加工上下料、装配及嵌入工件( 组装插件)、先进制造业、协同作业机器人等。
特点:
1.专为协作机器人设计:3种宽行程,多种抓取模式适应各种应用场景;
2.编程简单易上手:自动部件检测,位置反馈和验证;
3.符合工业要求:高负载和夹持力,高精密装配耐用;
4.长达3-5年的使用寿命;
5.免费提供编程软件。
二、三指夹具
三指夹具极具灵活性,可抓握各种形状和尺寸的零件,适应物体的形状以获得牢固的抓力,与所有工业机器人兼容。
三指自适应机器人夹具追求功能及柔性化,是制造和机器人研究的理想选择,完全兼容多数主流工业机器人和协助机器人,是机器人机械臂实施精细作业的关键。
三指夹具的特点:
1.有4种抓取类型:捏合模式、宽模式、剪刀模式、基本模式,几乎可以抓取任何东西。
2.从每个手指获取反馈,以获得牢固的抓力及精确度。
3.即插即用:使用我们的三指夹具能在几分钟内安装并编程您的机器人。
4.项目创新:通过使用我们的夹具和传感器的示例获得灵感。远程操作,人机协作,移动机器人,箱子拾取,配套和高级装配。
三、平行夹爪
高精度和 50 毫米平行行程使这种的机器人夹具非常适合精密装配任务,而其密封设计可确保在最恶劣的制造条件下(包括 CNC 加工)的可靠性。
优点:
1.安装简单:两个步骤。 首先,使用简单机械接口快速将夹爪连接到机器人。 其次,将夹爪直接连接到机器人手腕通信连接器,以实现市场上最简单,最坚固的集成。
2.实现前所未有的精度:使用机器人和夹具在CNC夹具内执行可重复的零件定位,以及精确的插入装配任务。
3.消除夹具和固定装置:将手腕相机添加到您的夹具中以定位和拾取零件。 您不再需要昂贵的夹具或固定装置。
4.加快您的生产线:通过向同一机器人添加多个夹具来缩短周期时间。